Czego się nauczysz?
- Rozkładać siły na składowe
- Obliczać moment względem punktu
- Sprawdzać wyniki korzystając z twierdzenia o zmianie bieguna redukcji
- Redukować układ sił do najprostszej postaci
- Zaznaczać wynik redukcji na rysunku
- Obliczać wypadkową obciążenia ciągłego
Program kursu
Rozwiń wszystkoCałkowity czas: 2:42:45
+ 1. Wstęp 0:00:55
W tym filmie chciałabym przybliżyć temat wektorów, zaczynając od podstaw i stopniowo przemieszczając się do bardziej zaawansowanych koncepcji.
Na samym początku omówimy podstawową definicję wektora jako obiektu, który ma zarówno wielkość (długość) jak i kierunek. Przyjrzymy się również temu, jak wektory są reprezentowane w przestrzeni, czy to dwu-, czy trójwymiarowej, oraz jakie mają to implikacje dla naszych działań na nich.
Następnie przejdziemy do prostych działań na wektorach, takich jak dodawanie i odejmowanie. Pokażę, jak te operacje odzwierciedlają fizyczne przesunięcia i zmiany w przestrzeni. Warto zrozumieć te podstawy, ponieważ stanowią one fundament dla bardziej zaawansowanych operacji i analizy.
Kolejnym ważnym zagadnieniem, które omówimy, będzie rozkładanie wektorów na składowe. Ten koncept jest kluczowy w wielu dziedzinach naukowych, ponieważ pozwala nam analizować ruchy i siły w różnych kierunkach niezależnie. Pokażę również, jak korzystać z trygonometrii do rozkładania wektorów na składowe i odwrotnie.
Omówimy takie tematy jak iloczyn skalarny i iloczyn wektorowy. Te operacje mają szerokie zastosowanie w fizyce, w tym w obliczaniu pracy, momentu siły oraz ruchu obrotowego. Omówię zasady tych operacji oraz pokażę, jak je stosować w praktyce.
Ogólnie rzecz biorąc, celem tego filmu jest nie tylko przedstawienie podstawowych koncepcji związanych z wektorami, ale również zapewnienie solidnego fundamentu, który będzie przydatny w dalszych częściach kursu.
W filmie skupimy się na zrozumieniu pojęcia momentu względem punktu oraz na sposobach praktycznego wyobrażania sobie tego pojęcia. Moment względem punktu jest kluczowym konceptem w dziedzinie fizyki, inżynierii i matematyki, który pozwala nam analizować rotacje i obracające się obiekty.
Na początku omówimy, czym dokładnie jest moment. Będziemy analizować, jak odnosi się to pojęcie do fizycznej interpretacji rotacji obiektów wokół ustalonego punktu odniesienia. Prześledzimy również związki między momentem, a siłą oraz odległością od punktu obrotu, co pozwoli nam na lepsze zrozumienie tego zagadnienia.
W dalszej części filmu rozwiążemy prosty przykład, który pokaże nam, jak obliczać moment względem punktu w praktyce. Wykorzystamy podstawowe równania oraz zasady fizyki, aby przekształcić teorię na konkretne obliczenia. Ten krok pozwoli widzom lepiej zrozumieć, jak stosować teorię w praktyce i jakie są jej realne zastosowania.
W kolejnym segmencie omówimy kwestie związane z wektorem głównym. Wyjaśnimy, czym jest wektor główny ponieważ przyda nam się to do dalszych przykładów rachunkowych.
Na zakończenie filmu rozwiążemy krótki przykład obrazujący kwestie związane z wektorem głównym. Skorzystamy z wcześniejszych omówionych pojęć oraz równań, aby przećwiczyć praktyczne zastosowanie tych konceptów.
W kolejnym filmie w kursie skupimy się na kwestiach związanych z redukcją płaskiego układu sił oraz zagadnieniem zbieżnego układu sił. Te pojęcia są niezwykle istotne w analizie mechaniki, ponieważ pozwalają nam uprościć złożone układy sił do bardziej przystępnych form, co ułatwia analizę i obliczenia.
Rozpoczniemy od omówienia redukcji płaskiego układu sił. Będziemy analizować, jak można zredukować skomplikowane układy sił do pojedynczej siły i momentu względem wybranego punktu. Prześledzimy różne techniki redukcji, takie jak suma sił i momentów, aby zobaczyć, jak można skutecznie uprościć analizę układów sił.
Następnie zagłębimy się w temat zbieżnego układu sił. Omówimy, czym dokładnie jest zbieżny układ sił oraz jakie są jego charakterystyczne cechy. Będziemy analizować, jak identyfikować zbieżne układy sił oraz jak wykorzystać tę wiedzę do dalszej analizy i obliczeń.
Kolejnym ważnym aspektem, który poruszymy, będzie twierdzenie o zmianie bieguna redukcji. Wyjaśnimy, czym jest to twierdzenie oraz jak można go wykorzystać do sprawdzania naszych obliczeń i wyników. Przeanalizujemy sytuacje, w których zmiana bieguna redukcji jest konieczna oraz jak dokładnie przeprowadzać takie operacje.
W ostatniej części filmu przejdziemy do rozwiązania prostego przykładu rachunkowego, który pozwoli nam dokładniej zrozumieć twierdzenie o zmianie bieguna redukcji. Skorzystamy z wcześniej omówionych pojęć i technik redukcji sił, aby przekształcić złożony układ sił w bardziej przystępną formę. Pokażemy, jak można skutecznie stosować twierdzenie o zmianie bieguna redukcji do tego konkretnego przypadku.
W pierwszym przykładzie obliczeniowym skoncentrujemy się na redukcji układu sił do punktu O oraz na określeniu najprostszej postaci, do jakiej można zredukować ten układ. Będziemy analizować, jak możemy uprościć analizę układu sił poprzez skupienie się na jednym punkcie odniesienia i wyznaczenie odpowiednich parametrów.
Rozpoczniemy od identyfikacji punktu O jako punktu, względem którego chcemy dokonać redukcji układu sił. Wykorzystując zasadę równowagi, obliczymy moment względem tego punktu dla całego układu sił. Poprzez zastosowanie odpowiednich równań i metod obliczeniowych, będziemy w stanie określić, jaką wartość ma ten moment i jak wpływa on na analizowany układ sił.
Następnie przejdziemy do określenia najprostszej postaci, do jakiej możemy zredukować ten układ sił. Skorzystamy z wyników naszych obliczeń momentu względem punktu O, aby zidentyfikować główną siłę oraz jej kierunek. Wykorzystując te informacje, będziemy mogli uprościć układ do pojedynczego wektora, co ułatwi dalszą analizę i zrozumienie dynamiki tego systemu.
Kolejnym krokiem będzie obliczenie wektora głównego oraz jego modułu. Wektor główny jest kluczowym pojęciem związanym z momentem siły i pozwala nam lepiej zrozumieć, jak siły działają w danym układzie. Przeanalizujemy, jak można wyznaczyć ten wektor oraz jak obliczyć jego moduł, co będzie miało istotne znaczenie dla dalszej analizy i interpretacji naszych wyników.
Podsumowując, poprzez rozwiązanie tego pierwszego przykładu obliczeniowego będziemy mogli lepiej zrozumieć proces redukcji układu sił do punktu O oraz jakie korzyści wynikają z takiej redukcji. Pozwoli nam to również lepiej zrozumieć, jak wykorzystać pojęcia momentu względnego punktu i wektora głównego w praktyce inżynierskiej i naukowej.
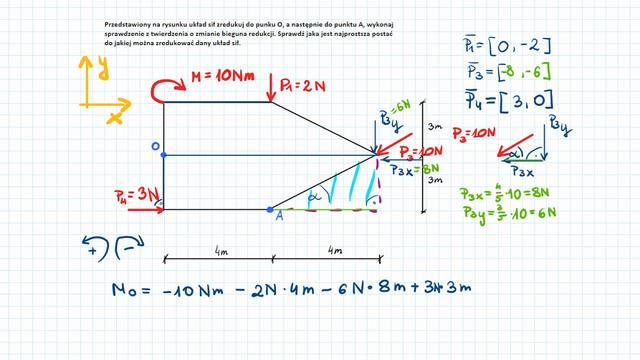
W kolejnym przykładzie obliczeniowym skoncentrujemy się na redukcji układu sił do punktu O oraz na określeniu najprostszej postaci, do jakiej można zredukować ten układ. Oprócz tego, będziemy musieli rozłożyć jedną z sił na składowe, wykorzystując funkcje trygonometryczne, co dodatkowo wprowadzi nas w obszar analizy wektorów i ich składowych.
Rozpoczniemy od identyfikacji punktu O jako punktu, względem którego chcemy dokonać redukcji układu sił. Następnie, przy użyciu zasad równowagi sił oraz momentów, obliczymy moment względem tego punktu dla całego układu sił. To pozwoli nam na określenie wpływu tych sił na analizowany system.
Kolejnym krokiem będzie rozwiązanie konieczności rozłożenia jednej z sił na składowe. Skorzystamy z funkcji trygonometrycznych, takich jak sinus i cosinus, aby określić wartości tych składowych. To pozwoli nam lepiej zrozumieć, jak siła działa w różnych kierunkach i jak wpływa na cały system.
Po obliczeniach momentu względem punktu O oraz rozłożeniu siły na składowe, przejdziemy do określenia wektora głównego oraz obliczenia jego modułu. Ten krok jest kluczowy dla pełnego zrozumienia oraz dla dalszych analiz.
Na koniec pokażemy, jak wynik redukcji zaznaczyć na rysunku, co pozwoli nam lepiej wizualizować i interpretować wyniki naszych obliczeń. Poprzez tę wizualizację będziemy mogli lepiej zrozumieć, jak układ sił został zredukowany i jakie są jego konsekwencje dla analizowanego systemu.
Poprzez rozwiązanie tego przykładu obliczeniowego będziemy mogli lepiej zrozumieć proces redukcji układu sił, wykorzystanie funkcji trygonometrycznych do rozkładania sił na składowe, oraz jak teoretyczne wyniki przekładają się na praktyczne zastosowania w inżynierii i fizyce.
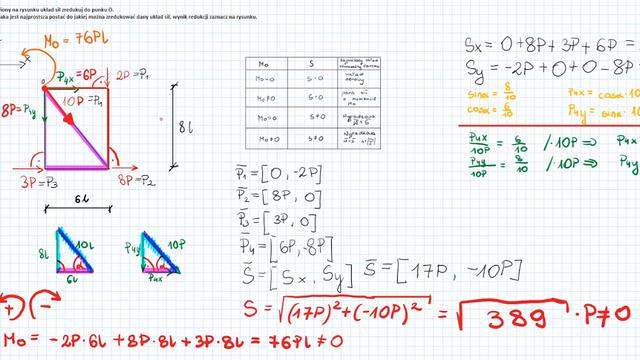
W tym przykładzie obliczeniowym skupimy się na sprawdzeniu, jaka jest najprostsza postać, do jakiej można zredukować układ sił, który jest zbieżny. Przeanalizujemy, jak policzyć wektor główny i jego moduł. Dodatkowo, pokażemy, co możemy zrobić, gdy nie zauważymy, że układ jest zbieżny, oraz rozłożymy dwie siły na składowe.
Rozpoczniemy od identyfikacji układu sił jako zbieżnego, co będzie kluczowe dla naszej analizy. Następnie przystąpimy do obliczenia wektora głównego, który pozwoli nam lepiej zrozumieć, jak siły działają w danym układzie. Skorzystamy z właściwości układu zbieżnego, aby obliczyć ten wektor i jego moduł.
Dodatkowo, rozłożymy dwie siły na składowe, wykorzystując odpowiednie funkcje trygonometryczne. To pozwoli nam lepiej zrozumieć, jak siły oddziałują w różnych kierunkach i jak możemy uwzględnić te składowe w naszych obliczeniach.
Poprzez rozwiązanie tego przykładu obliczeniowego będziemy mogli lepiej zrozumieć, jak określić najprostszą postać układu sił, jak korzystać z właściwości układu zbieżnego, jak rozłożyć siły na składowe oraz jak unikać błędów w analizie sił i momentów. To pozwoli nam na bardziej świadome i precyzyjne stosowanie tych konceptów w praktyce.
W kolejnym przykładzie obliczeniowym skupimy się na redukcji układu sił do punktu O oraz na określeniu najprostszej postaci, do jakiej można zredukować ten układ. Oprócz tego, obliczymy moment względem punktu O oraz wektor główny i jego moduł. Dodatkowo, będziemy musieli rozłożyć jedną z sił na składowe, wykorzystując funkcje trygonometryczne. Na zakończenie pokażemy, jak wynik redukcji zaznaczyć na rysunku, co ułatwi wizualizację i interpretację rezultatów.
Rozpoczniemy od identyfikacji punktu O jako punktu, względem którego dokonamy redukcji układu sił. Następnie, obliczymy moment względem tego punktu, korzystając z zasad równowagi sił i momentów. Pozwoli to nam na określenie, jakie siły i momenty przyczyniają się do obrotu systemu wokół tego punktu.
Kolejnym krokiem będzie obliczenie wektora głównego oraz jego modułu. Wektor główny jest istotnym pojęciem związanym z momentem siły i pozwala na lepsze zrozumienie, jak siły działają w danym układzie. Skorzystamy z wyników analizy momentu względem punktu O, aby obliczyć wektor główny i jego moduł.
Na zakończenie pokażemy, jak wynik redukcji zaznaczyć na rysunku. Dzięki temu będziemy mogli lepiej zobaczyć, jak układ sił został zredukowany i jakie są jego konsekwencje dla analizowanego systemu.
Poprzez rozwiązanie tego przykładu obliczeniowego będziemy mogli lepiej zrozumieć proces redukcji układu sił do najprostszej postaci, jak korzystać z funkcji trygonometrycznych do rozkładania sił na składowe oraz jak interpretować i prezentować wyniki naszych obliczeń.
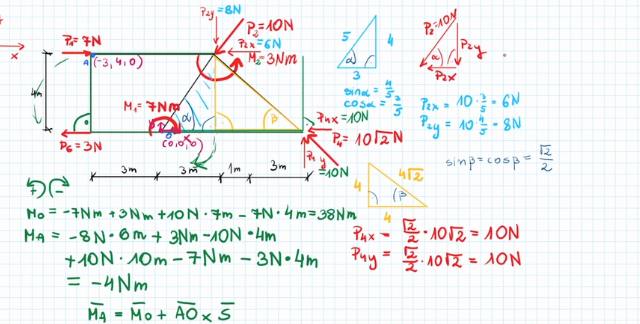
W kolejnym przykładzie obliczeniowym skupimy się na redukcji układu sił, najpierw do punktu O, a następnie do punktu A. Naszym celem będzie ustalenie najprostszej postaci, do jakiej można zredukować ten układ sił. Dodatkowo, przeprowadzimy sprawdzenie zgodności z twierdzeniem o zmianie bieguna redukcji, co pozwoli nam zweryfikować nasze obliczenia.
Rozpoczniemy od redukcji układu sił do punktu O. Wykorzystując zasady równowagi sił i momentów, obliczymy moment względem tego punktu oraz zredukujemy układ do pojedynczej siły i momentu względem punktu O. Następnie przejdziemy do redukcji układu do punktu A.
Kolejnym krokiem będzie wykonanie sprawdzenia zgodności z twierdzeniem o zmianie bieguna redukcji. Skorzystamy z właściwości tego twierdzenia, aby zweryfikować nasze obliczenia i upewnić się, że nasza redukcja układu do punktu A jest poprawna.
Poprzez wykonanie tych kroków będziemy mogli lepiej zrozumieć, jak można redukować układ sił do różnych punktów i jak to wpływa na analizę i zrozumienie mechaniki. Dodatkowo, sprawdzenie zgodności z twierdzeniem o zmianie bieguna redukcji pozwoli nam na zweryfikowanie poprawności naszych obliczeń i podejść do analizy układów sił.
W kolejnym przykładzie obliczeniowym skupimy się na redukcji układu sił najpierw do punktu O, a następnie do punktu A. Naszym głównym celem będzie znalezienie najprostszej postaci, do jakiej można zredukować ten układ sił, mając do czynienia z większą liczbą sił niż w poprzednich przykładach.
Rozpoczniemy od analizy układu sił i obliczenia sumarycznego momentu względem punktu O.
Kolejnym krokiem będzie redukcja układu do punktu A, wykorzystując zasady równowagi sił i momentów. Porównamy wyniki obu redukcji, aby określić, która postać układu jest najbardziej wygodna i prostsza do analizy.
Dodatkowo, sprawdzimy zgodność naszych obliczeń z twierdzeniem o zmianie bieguna redukcji. To pozwoli nam zweryfikować poprawność naszych wyników i upewnić się, że nasza analiza jest wiarygodna.
Poprzez rozwiązanie tego bardziej skomplikowanego przykładu obliczeniowego, będziemy mogli lepiej zrozumieć proces redukcji układu sił do różnych punktów oraz jakie korzyści wynikają z wykorzystania twierdzenia o zmianie bieguna redukcji.
W teoretycznym filmie omówimy kwestie związane z obciążeniem ciągłym. Przedstawimy różne rodzaje obciążeń ciągłych oraz sposoby, jak można je zamienić na wypadkową.
Rozpoczniemy od wprowadzenia pojęcia obciążenia ciągłego i omówienia jego znaczenia w kontekście inżynierii i nauki materiałów. Następnie przedstawimy różne rodzaje obciążeń ciągłych, takie jak obciążenie równomiernie rozłożone, trójkątne, czyli powierzchniowe.
Dalej omówimy metody konwersji obciążeń ciągłych na wypadkową siłę. Skupimy się na technikach takich jak wyznaczanie środka ciężkości oraz zastosowanie odpowiednich równań równowagi.
Przeanalizujemy również przypadki praktyczne, aby zobaczyć, jak można stosować teorie obciążenia ciągłego w rzeczywistych zastosowaniach inżynierskich i naukowych.
Poprzez omówienie tych zagadnień, wszyscy będą mogli lepiej zrozumieć, jak analizować i modelować obciążenia ciągłe oraz jak wykorzystać teorię do rozwiązywania problemów związanych z projektowaniem i analizą struktur i materiałów.
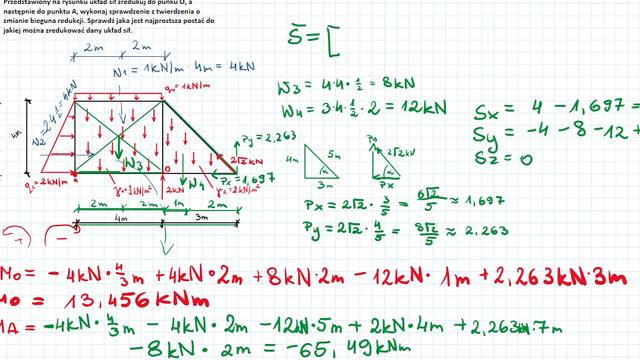
W przedostatnim przykładzie obliczeniowym skoncentrujemy się na redukcji układu sił, najpierw do punktu O, a następnie do punktu A. Naszym głównym celem będzie określenie najprostszej postaci, do jakiej można zredukować ten układ sił. Dodatkowo, przeprowadzimy sprawdzenie zgodności z twierdzeniem o zmianie bieguna redukcji, aby zweryfikować nasze obliczenia. Ten przykład będzie zawierał obciążenie ciągłe i powierzchniowe, co dodatkowo wpłynie na trudność zadania, ale pozwoli nam lepiej zrozumieć kwestie związane z tym zagadnieniem.
Rozpoczniemy od analizy układu sił, uwzględniając zarówno obciążenie ciągłe, jak i powierzchniowe. Następnie dokonamy redukcji tego układu do punktu O, obliczając sumaryczny moment względem tego punktu oraz wypadkową siłę działającą na niego.
Kolejnym krokiem będzie redukcja układu do punktu A, co pozwoli nam zbadać, czy jest to najprostsza forma układu. Skorzystamy z właściwości układu sił i zasad równowagi, aby przeprowadzić tę redukcję.
Dodatkowo, sprawdzimy zgodność naszych obliczeń z twierdzeniem o zmianie bieguna redukcji. Skorzystamy z tej zasady, aby zweryfikować nasze obliczenia i upewnić się, że nasza analiza jest wiarygodna.
Poprzez rozwiązanie tego przykładu obliczeniowego, będziemy mogli lepiej zrozumieć, jak można redukować układ sił do różnych punktów, uwzględniając różne rodzaje obciążeń, oraz jakie korzyści wynikają z wykorzystania twierdzenia o zmianie bieguna redukcji.
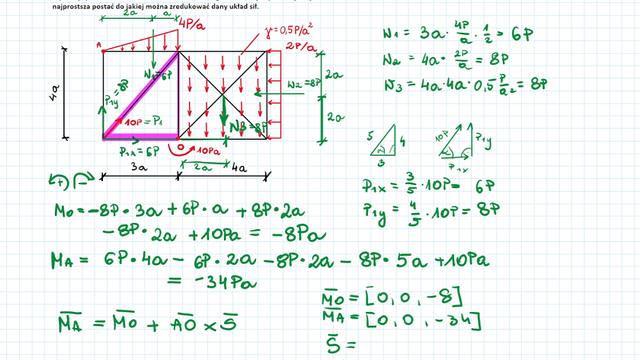
W ostatnim przykładzie obliczeniowym skoncentrujemy się na redukcji układu sił, najpierw do punktu O, a następnie do punktu A. Naszym celem będzie określenie najprostszej postaci, do jakiej można zredukować ten układ sił. Dodatkowo, przeprowadzimy sprawdzenie zgodności z twierdzeniem o zmianie bieguna redukcji, aby zweryfikować nasze obliczenia. Ten przykład będzie zawierał obciążenie ciągłe i powierzchniowe, co dodatkowo wpłynie na trudność zadania, ale pozwoli nam lepiej zrozumieć kwestie związane z tym zagadnieniem. Jest to ostatni przykład w tym kursie, dlatego może wydawać się najtrudniejszy, ale po przejściu przez wszystkie przykłady nie będzie stanowił problemu.
Rozpoczniemy od analizy układu sił, uwzględniając zarówno obciążenie ciągłe, jak i powierzchniowe. Następnie dokonamy redukcji tego układu do punktu O, obliczając sumaryczny moment względem tego punktu.
Kolejnym krokiem będzie redukcja układu do punktu A, co pozwoli nam zbadać, czy jest to najprostsza forma układu. Skorzystamy z właściwości układu sił i zasad równowagi, aby przeprowadzić tę redukcję.
Dodatkowo, sprawdzimy zgodność naszych obliczeń z twierdzeniem o zmianie bieguna redukcji. Skorzystamy z tej zasady, aby zweryfikować nasze obliczenia i upewnić się, że nasza analiza jest wiarygodna.
Mimo że to ostatni przykład w kursie, będziemy do końca zaangażowani w proces nauki i zrozumienia zagadnień związanych z redukcją układu sił. Poprzez rozwiązanie tego przykładu, będziemy mogli jeszcze lepiej zrozumieć, jak analizować i modelować skomplikowane układy sił, uwzględniając różne rodzaje obciążeń.
Wymagania
- Zaangażowanie i chęci do nauki
- Znajomość matematyki na poziomie klasy 1 szkoły średniej
Opis kursu
W trakcie tego kursu będziesz opanowywać sztukę redukcji płaskich układów sił do ich najbardziej podstawowej postaci. To nie tylko kluczowy aspekt w dziedzinie inżynierii czy konstrukcji, lecz także fundament w analizie i projektowaniu rozmaitych struktur oraz mechanizmów.
Początkowe etapy kursu będą poświęcone wprowadzeniu do podstawowych pojęć związanych z układami sił, równowagą mechaniczną oraz elementami geometrii. Następnie przyjrzymy się różnym rodzajom obciążeń występujących w układach, obejmując obciążenia ciągłe, punktowe i powierzchniowe.
Kluczowy nacisk zostanie położony na metodologie redukcji układów sił do punktów, co ułatwi analizę oraz zrozumienie wpływu sił w danym systemie. Poznamy różnorodne techniki i strategie, które pozwolą nam sprowadzić złożony układ sił do jego najbardziej uproszczonej postaci, co z kolei ułatwi dalsze obliczenia oraz zrozumienie dynamiki badanego systemu.
Nie będzie to tylko teoria - przyjrzymy się także praktycznym przykładom, które pozwolą nam zastosować nowo zdobytą wiedzę w rzeczywistych sytuacjach projektowych. Będziemy analizować układy sił występujące w konstrukcjach budowlanych aby lepiej zrozumieć praktyczne korzyści płynące z umiejętności redukcji układów sił.
Przez przejście przez ten kurs, zdobędziesz solidne fundamenty, które pozwolą Ci efektywnie analizować i projektować różnorodne struktury i mechanizmy, eliminując złożoność z układów sił i ułatwiając sobie pracę inżynierską.
W pierwszej kolejności przystąpimy do wszechstronnego omówienia tematów związanych z wektorami. Nasze działania będą obejmować nie tylko wprowadzenie do podstawowych pojęć z tej dziedziny, ale również głębsze zrozumienie operacji na wektorach oraz ich znaczenie w analizie układów sił. Skupimy się na tym, jakie konsekwencje niesie za sobą rozkładanie sił na składowe, co jest kluczowe dla lepszego zrozumienia oddziaływań w badanych strukturach.
Po gruntownym zaznajomieniu się z wektorami, przejdziemy do bardziej skomplikowanych zagadnień związanych z obliczaniem momentu względem danego punktu. Poprowadzę Cię przez praktyczne metody podejścia do tego zagadnienia, abyś mógł skutecznie stosować tę wiedzę w różnych sytuacjach inżynieryjnych. Moment jest kluczowym pojęciem w analizie mechaniki, szczególnie jeśli chodzi o równowagę oraz stabilność struktur.
Nie zapomnimy także o teorii dotyczącej wektora głównego oraz twierdzenia o zmianie biegunu redukcji. Podczas omawiania tych zagadnień pokażę, jak redukować układ sił do jego najprostszej postaci i jakie korzyści płyną z takiej analizy.
Nie ograniczymy się jednak tylko do suchych teorii - w ramach kursu online skupimy się również na praktycznych aspektach związanych z prezentacją wyników redukcji na rysunku. Zbadamy, jak można w sposób efektywny i czytelny przedstawić rezultaty analizy sił wizualnie, co ułatwi zrozumienie i interpretację wyników.
W całym kursie online, który składa się z łącznie 13 filmów, będziemy zgłębiać różnorodne aspekty analizy płaskich układów sił oraz przedstawiać praktyczne zastosowania zdobytej wiedzy. Dzięki temu zdobędziesz nie tylko solidne podstawy teoretyczne, ale także umiejętności praktycznego stosowania tej wiedzy w różnych sytuacjach inżynierskich.
O autorze kursu
Karolina K***
Oceny i recenzje uczniów
Razem z korepetytorami pracujemy nad jak najlepszą jakością kursów, dlatego Twoja opinia jest dla nas bardzo ważna.
🎁 Otrzymaj rabat -20% na cały koszyk!
Dodaj opinię do kursu, aby otrzymać wiadomość e-mail z kodem rabatowym.
Aby dodać opinię, musisz być zalogowany.
Zaloguj się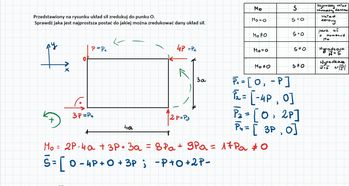
Kurs wycofany ze sprzedaży
-
13 filmów
-
ponad 163 min materiału wideo
-
bez ograniczeń czasowych
-
dostęp 24/7 przez stronę
-
obsługa urządzeń mobilnych





