W celu wyznaczenia transmitancji wypadkowej na podstawie schematu blokowego układu, należy znać podstawowe wzory i zależności, jakich możemy używać. Przedstawiam zatem najczęściej występujące przypadki.
Połączenie szeregowe jest najprostszym jakie może występować w układach i przedstawione zostało na rysunku pierwszym.

Jest ono szczególnie proste zarówno w znalezieniu w układzie, jak i w wyznaczeniu transmitancji zastępczej dla takiego układu. Charakteryzuje się ono tym, że między blokami nie występuje żaden inny (brak węzła czy też sumatora). Chcąc zastąpić te dwa elementy jednym możemy zastosować poniższy wzór:
Zaskakujące i mylące może być to dla osób, które mają opanowane łączenie rezystorów - uprzedzam, że wzory będą tu inne i nie będzie analogii. Zatem transmitancja zastępcza (wypadkowa) dla takiego połączenia jest iloczynem składowych transmitancji. Proste, prawda? Przejdźmy zatem dalej.
Połączenie równoległe charakteryzuje się tym, że zaczyna się węzłem rozgałęziającym, a kończy się sumatorem. Taki układ przedstawiono poniżej.

Element, który jest kółkiem z krzyżykiem w środku nazywa się sumatorem. Jego funkcją jest sumowanie sygnałów dochodzących do niego. Oznacza to, że za nim będzie występować suma transmitancji G1 oraz G2. I taki też jest wzór na zastąpienie połączenia równoległego.
Również wydaje się to być dosyć proste, dlatego przejdźmy do ostatniej możliwości, czyli sprzężenia zwrotnego.

Sprzężenie zwrotne występuje wtedy, kiedy analizując układ najpierw napotykamy na sumator, do którego dochodzi również sygnał z węzła rozgałęziającego. Jest to charakterystyczna struktura, którą przy odrobinie doświadczenia, bardzo łatwo można zlokalizować. Należy wyróżnić tutaj tor główny , czyli drogę, którą sygnał porusza się w pierwszej kolejności. Analizując układ od lewej strony możemy zauważyć, że najpierw sygnał dochodzi do transmitancji G1, a następnie jest rozgałęziony, dochodzi na transmitancję G2 i wchodzi na sumator. Oznacza to, że transmitancja G1 leży w torze głównym układu, a transmitancja G2 w torze sprzężenia zwrotnego. Jest to ważne przy wyznaczaniu transmitancji zastępczej takiego połączenia.
W liczniku występuje transmitancja znajdująca się w torze głównym układu. W mianowniku znajduje się iloczyn transmitancji w torze głównym oraz w torze sprzężenia zwrotnego. Przed nimi stoi znak plus albo minus. Jest to znak przeciwny do tego, znajdującego się przy sumatorze. W naszym układzie nie było znaku ujemnego przy strzałce, zatem napisalibyśmy we wzorze znak dodatni (przeciwny). Moglibyśmy mieć do czynienia z układem, w którym sygnał sprzężenia zwrotnego dochodzi do sumatora ze znakiem ujemnym, jak pokazano poniżej (dodatkowy znak oznaczono na żółto).

W takiej sytuacji wzór przybrałby następującą postać:
Skoro przy strzałce mieliśmy znak ujemny, to w mianowniku pojawił się przeciwny, czyli plus.
W ten oto sposób przedstawione zostały trzy podstawowe sposoby przekształcania schematów blokowych. Przećwiczmy je na prostym przykładzie.

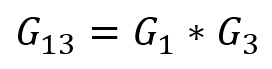
W pierwszej kolejności będziemy poszukiwać najprostszego połączenia, czyli szeregowego. Możemy takie dostrzec pomiędzy elementami G1 i G3.

Wyznaczamy zatem wzór dla połączenia tych dwóch elementów - dobrą praktyką jest zastępować elementy indeksami pochodzącymi od łączonych transmitancji, czyli w naszym przypadku od pierwszego i trzeciego, co można oznaczyć jako G13. Oczywiście jego wartość będzie równa iloczynowi tych dwóch elementów.
Przekształciliśmy zatem nasz układ do następującej postaci.

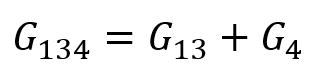
Należy teraz podjąć dalszą analizę układu. Możemy dostrzec, że elementy G13 oraz G4 są połączone równolegle, ponieważ ich połączenie rozpoczyna się węzłem rozgałęziającym, a kończy sumatorem. W wyniku przekształcenia otrzymamy układ jak poniżej.

Zgodnie ze wzorem dla połączenia równoległego, transmitancja G134 będzie równa:
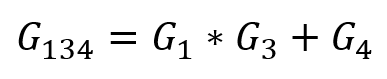
Możemy też od razu pod transmitancję G13 podstawić wyznaczony wzór na jej wartość. W konsekwencji otrzymamy:
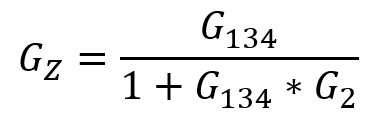
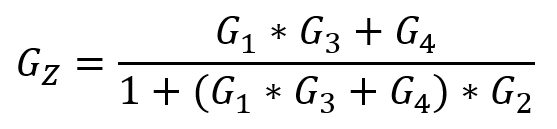
Pozostało nam już wyłącznie zastosowanie wzoru na sprzężenie zwrotne. W torze głównym występuje transmitancja G134, zaś w torze sprzężenia zwrotnego transmitancja G2. Ponieważ nie występują już żadne inne składowe, oznacza to, że wyznaczymy w ten sposób transmitancję zastępczą (wypadkową) układu.

Wykorzystując wzór na sprzężenie zwrotne możemy napisać, że transmitancja zastępcza (wypadkowa) jest równa:
Możemy jeszcze podstawić za G134 wyznaczowy na rysunku 13 wzór i ostatecznie otrzymujemy rozwiązanie:
W ten oto sposób poznaliśmy podstawowe przekształcenia i przećwiczyliśmy je na przykładzie. Niestety możliwych przypadków jest więcej i nie sposób omówić je w artykule, dlatego zachęcam do sprawdzenia kursu poświęconemu temu zagadnieniu pod tytułem Schematy blokowe w automatyce!






